
メンバーの成澤さんが「bFaaaPの技術解説」をまとめてくれましたので、ご参考にしてください。前回の徳重さんによる「請求項1のイラスト解説」と合わせると、
- bFaaaPの技術がどのようなものか
- 特許で権利として取得するために、どのような特徴を抽出し、
- それを日本語(英語)でどのように記載すれば良いか
が少し「身近」になるかもしれません。
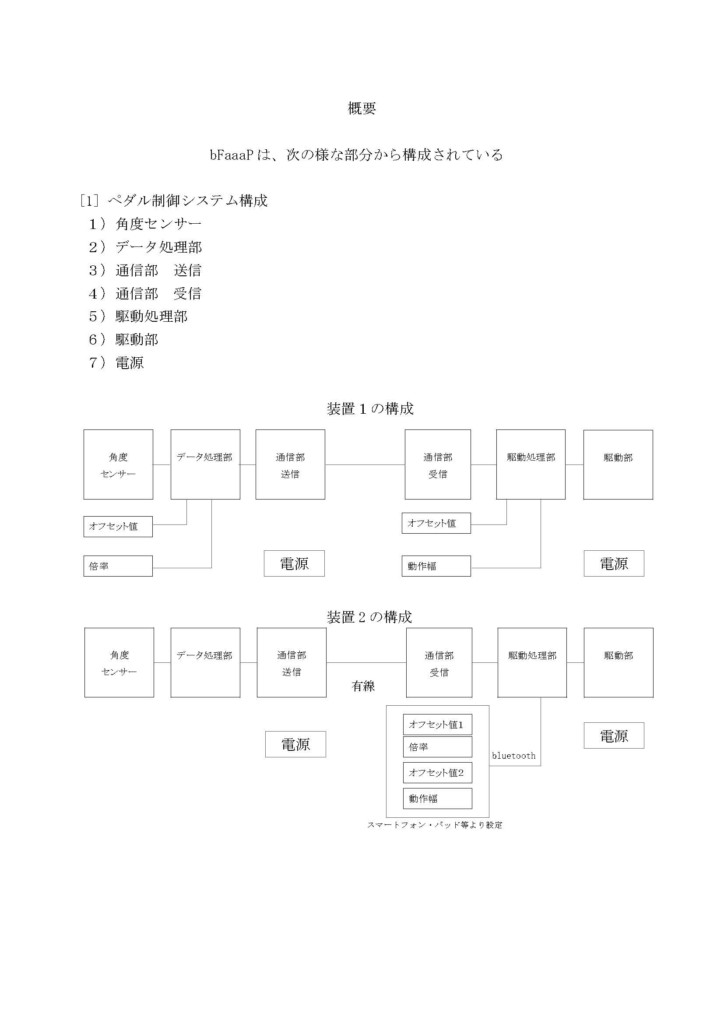
[2] 各部説明
1)角度センサー
物理的傾斜変化を検出しアナログ電圧もしくはデジタル値としてデータ処理部に送る
2)データ処理部
角度センサーより得られたデータにフィルター処理を行いノイズおよびドリフトの軽減行った後、駆動部制御に適した処理を行った後、オフセット値を加算し得られた値の正の値に倍率を掛け、上限値設けて通信部に送る
装置2の場合はフィルター、オフセット、倍率処理を行わず、通信部に送る
3)通信部(送信)
駆動部に制御データを送るため、有線、無線等を使って送信する部分で、各方式に合った規格、プロトコル(手順)処理を行う部分
1,2装置共に有線シリアル通信を行っている
4)通信部(受信)
有線、無線等を使って受信する部分で、各方式に合った規格、プロトコル(手順)処理を行う部分、1,2装置共に有線シリアル通信を行っている
5)駆動処理部
装置1の場合
駆動部の動作開始点(オフセット値)と、動作幅を設定する処理と、受信部より得られた、データの0から上限値を動作幅に写像する処理を行い、駆動部に制御値データを渡す。
装置2の場合
装置1のデータ処理部で行っていた、フィルター、オフセット、倍率処理をここで行っている、各データはスマートフォン、パッド等からBLUETOOTHを使用してデータを得る、
6)駆動部
駆動処理部から与えられたデータ値に従って、駆動する
オリエンタルモーター社の電動シリンダーを使用
ピアノペダルを制御で留意した点
システム全体の要件
1)上肢の身体的動作を検出してピアノのペダルを操作する
2)演奏、歌唱に支障を与えないこと
3)容易に製作出来る事
角度センサー部
要件
1)必要精度を持つこと
2)身体の動作に負担が掛からないこと
3)耐久性が有る事
4)歌えること
5)小型であること
6)入手が容易であること
7)安価であること
上記要件より、ボリュームにより身体の変位を検出する方法が比較的容易に考えられるが
身体への接触が避けられず、違和感を感じる、耐久性も劣る、そこで非接触で角度検出を行う、
センサーとして6軸センサー(加速度、角速度)及び、9軸センサー(加速度、角速度、地磁気)を用いて、角度検出を行ってみると9軸センサーがドリフトが少なく、比較的安価に入手可能で有ったので角度センサーとしてTDK製MPU9250を採用、モジュール化された物が市販されているのでそれを、筐体に納めた
角度センサーの装着方法
演奏中に上肢において、角度を容易に検出できる部位は、頭部に限られるのでセンサーを確実にブレの無いように固定する方法として、メガネのツル部分に装着した
その際、ツルと平行になる様に角度センサーを収めた筐体に溝を設け沿わせ固定する
その他、ブレの無い髪に着けるアクセサリーに納めることも可能
データ処理部 及び 通信部(送信)
要件
1)角度センサーからのデータを遅滞なく処理出来ること
2)小型であること
3)消費電力が少ないこと
4)通信部を包含していること
5)2つ以上のアナログデジタルコンバーターを有すること
6)汎用デジタルポートを必要数有すること
7)I2C通信ポートを有すること(角度センサーとの通信用)
8)ディバッグが容易に出来ること
9)電池駆動が出来ること
上記要件より、比較的プログラム開発が容易なEspressif Systems社ESP32採用した
通信部(受信)及び 駆動処理部
要件
1)消費電力が少ないこと
2)通信部を包含していること
3)2つ以上のアナログデジタルコンバーターを有すること
4)汎用デジタルポートを必要数有すること
5)ディバッグが容易に出来ること
6)電池駆動が出来ること
上記要件より、開発環境を揃えるため、角度処理部と同じEspressif Systems社ESP32採用した
駆動部
要件
1)ペダルを駆動出来るだけの力を有すること
2)演奏に支障のない程度の、応答速度を有すること
3)演奏に支障のない程度の、静粛性を有すること
4)バッテリー駆動が出来ること
上記要件より、オリエンタルモーター社の電動シリンダーを使用、ドライバーとして同社、DC24V仕様AZシリーズ αステップを使用 (EAC4-D05-AZAAD-1)
また、セットアップソフトとして同社提供のMEXE02を使用
(装置2は屋内使用とし100V仕様を使用)
ソフトの考慮点と対処
頭の傾斜角を検出して、その量に応じて、ピアノのペダルを圧下するものである
以下のことを考慮している
1)演奏姿勢の状態は演奏者によって初期傾斜角が各自異なる
2)最適な首の振る角度が演奏者によって各自異なる
3)ピアノペダル効果の開始点がピアノによって異なる
4)ピアノペダル効果の幅がピアノによって異なる
5)傾斜角が安定して得られること
以上を踏まえて
1)に対しては、オフセット値を導入して、動作開始点を演奏者が自由に設定出来る様にした
2)に対しては、倍率値(感度)をど導入 演奏者が自由に設定出来る様にした
3)に対しては、オフセット値を導入して、動作開始点をピアノに合わせて設定出来る様にした
4)に対しては、動作幅を導入して、ピアノに合わせて設定出来る様にした
5)に対しては、Madgwickフィルター処理を行ってドリフト・ノイズ等の軽減をした
ソフト概要
装置1
9軸センサーより得たデータをMadgwickフィルターを通し、ノイズ、ドリフト等を軽減した後、ピッチ角にたいしADから得られた角度オフセット処理と倍率処理を行い、0から99までの制御量に変換後、制御部に伝える制御部で受けた制御量に、ADで得られたオフセット、動作幅から、実際のペダル操作位置及び動作量を駆動部に伝えて制御する
装置2
9軸センサーより得たデータを有線で制御部に伝え制御部は得られた、データにMadgwickフィルター処理を行い、ノイズ、ドリフト等を軽減させた後スマートフォン等から送られた角度オフセット、倍率、動作点オフセット、動作幅処理を行った結果を制御位置として、駆動部に送る
駆動装置
オリエンタルモーター社のMEXE02を使用して、位置データとして1mmステップで0~47mmのデータを書き込んでダイレクトIO制御で制御している
スマホ等との通信はBLUETOOTHシリアルデータ
角度オフセット 0xxx o-30からo030(‐30度から+30度)
倍率 mxxx m001からm100(1倍から100倍)
起動点オフセット txxx t000からt047(0mmから47mm)
動作幅 wxxx w001からw047(1mmから47mm)
コメント